Project Overview
This is a prototype of housecare robot. It achieves path planning based on an improved Artificial Potential Field method and achieve motion control using PID algorithm. Improvements such as dynamic attraction coefficient were introduced to address issues like local minima, and stable vehicle motion and effective obstacle avoidance were achieveds.
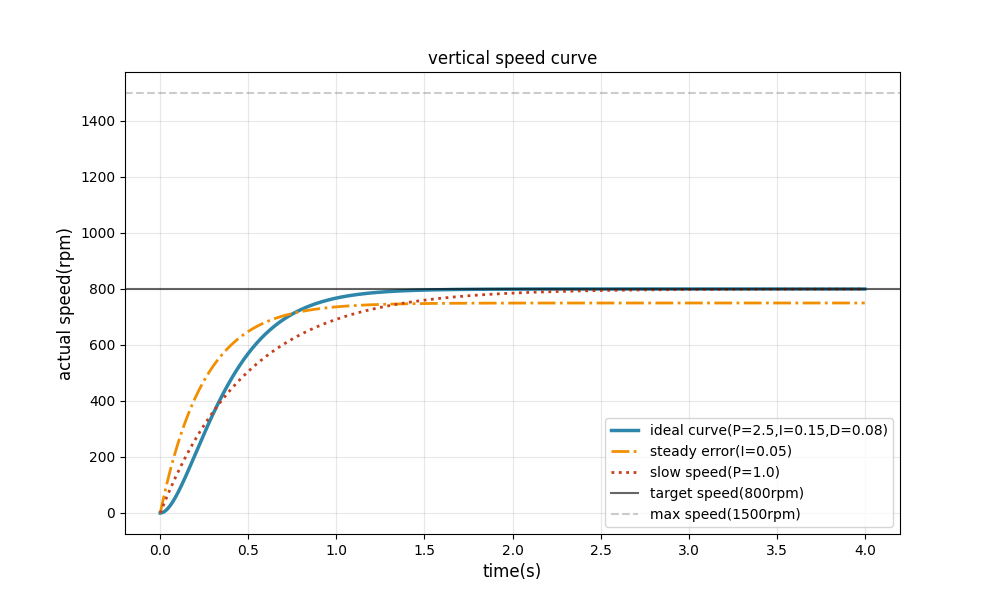
Tuning the PID parameters to control the vertical direction
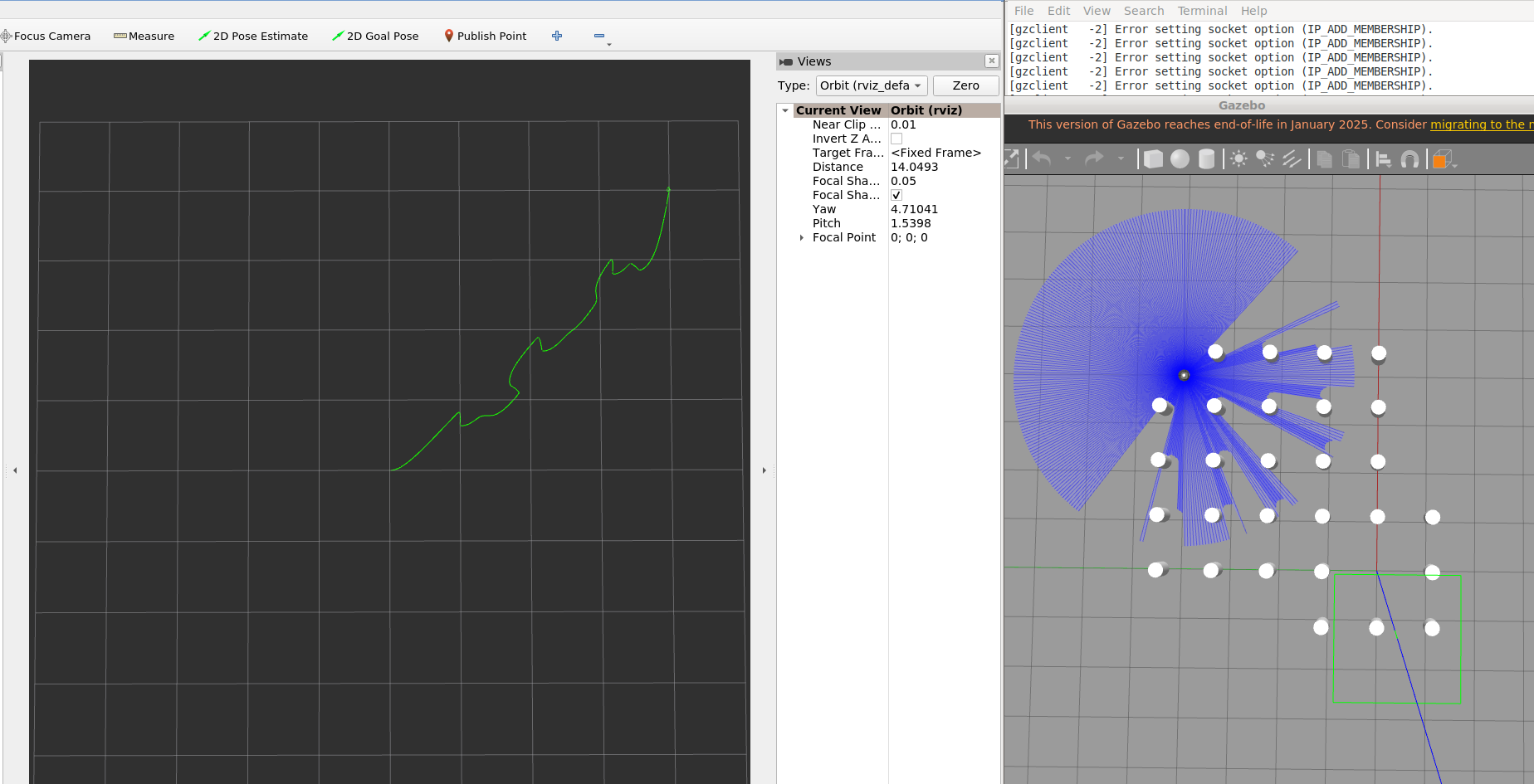
APF algorithm simulation in ROS
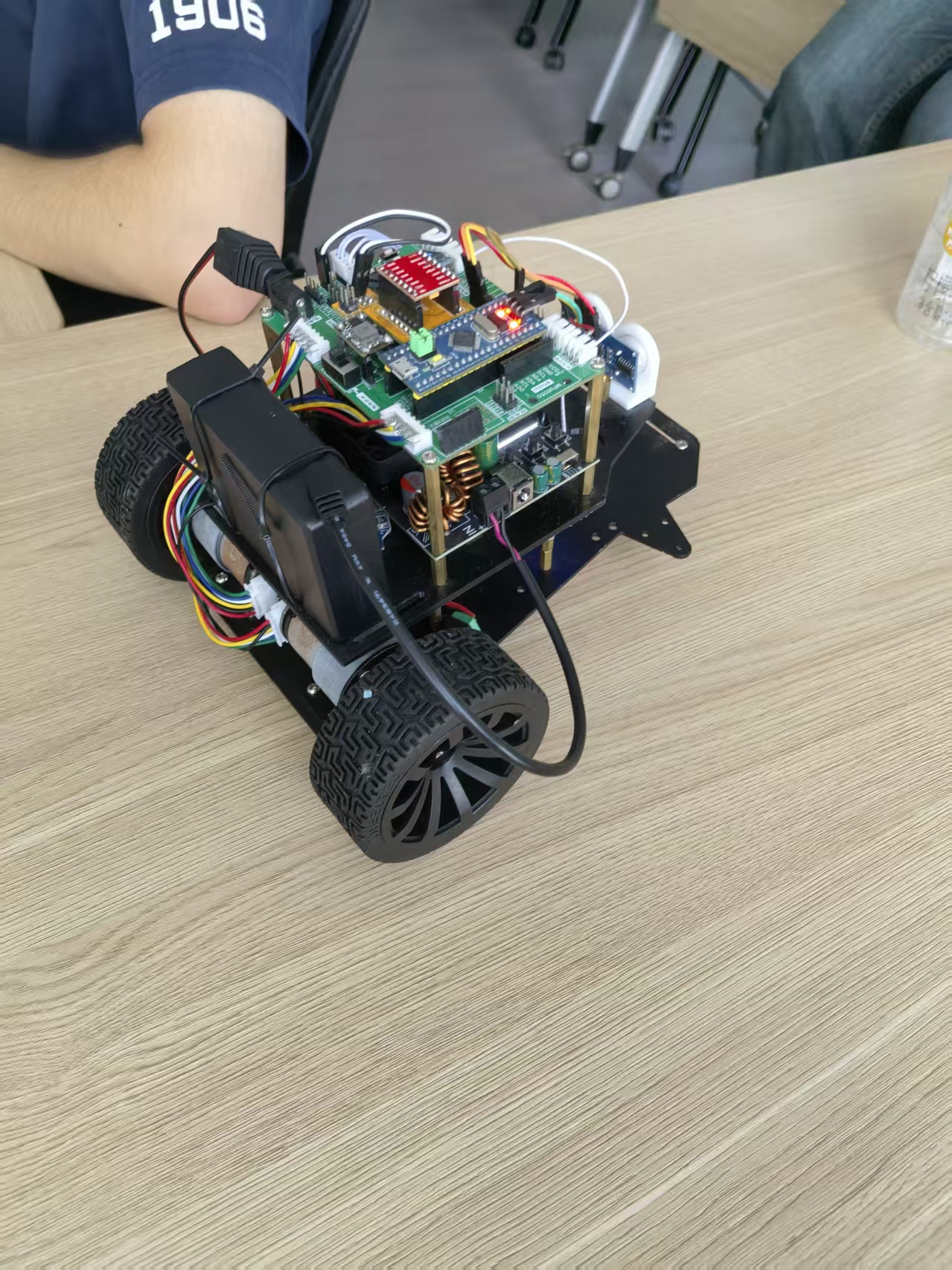
The small hoursecarerobot prototype
Code Repository
🔗 HousecareRobot — Visit this GitHub repository for full source code.